Elwema robotic cam cap assembly Cell
ELWEMA MANUFACTURED
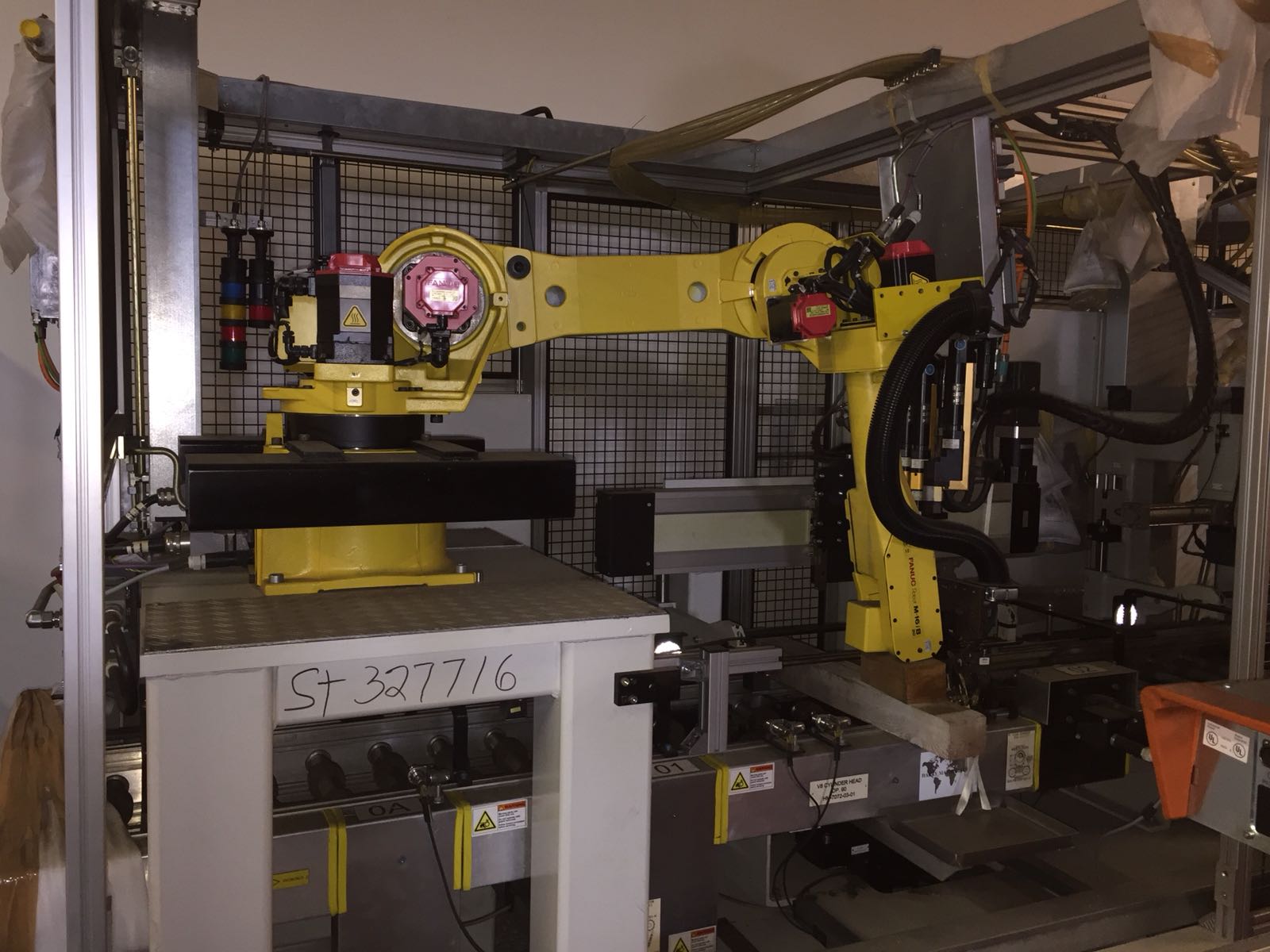
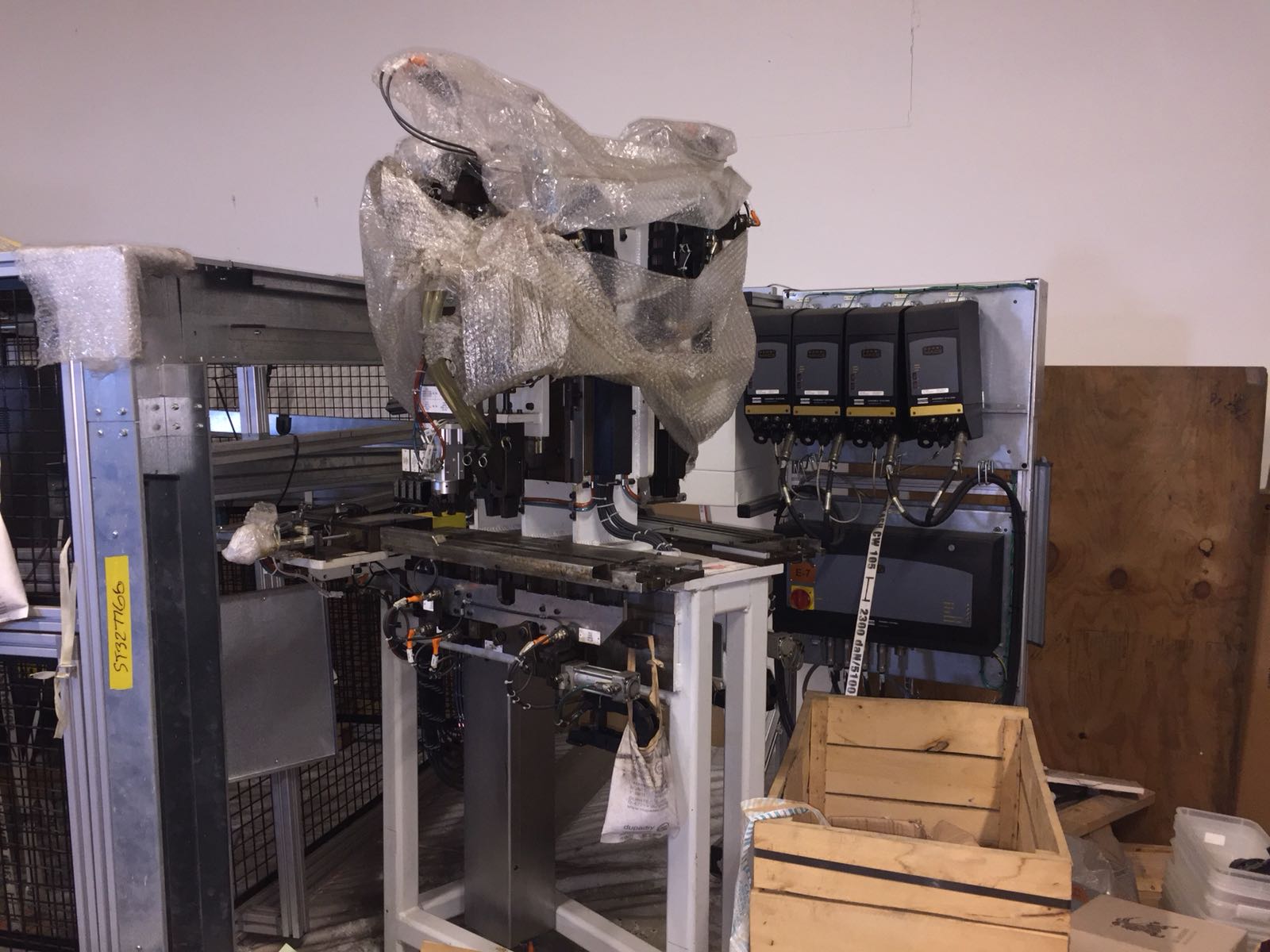
2008 ROBOTIC CAM CAP BEARING COVER ASSEMBLY MACHINE
WITH FANUC M16IB ROBOTS R30iA CONTROLLER
Description of functions
The machine assembles and identifies bearing covers. The cylinder head is turned in the flip over. Type check (Part ID). The part supply of the cam caps is automated. Position is checked and screws are sticked. Robots position the cam caps. The machine bolts the bearing covers together and identifies them with a dot-matrix marker. NOK cylinder heads are transported with the shuttle to the NOK outlet, OK cylinder heads are transported to the next machine. The cam caps of the NOK cylinder heads can be removed at a rework station with a power screwdriver.
Sequence of operations
-
-
The cylinder head runs in, is turned and identified.
-
Type check (Part ID).
-
The part supply of the cam caps is automated.
-
The parts-feed-in of the cam caps is automatic.
-
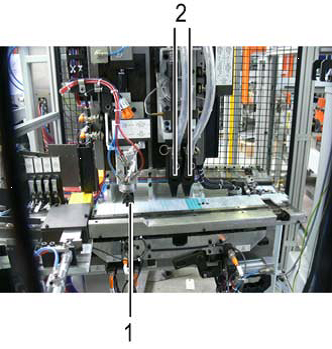
The position is checked, changed if necessary
-
and screws are inserted (2).
-
The robot positions the cam caps, which are then screwed in place
-
The machine identifies the cylinder heads with a dot matrix marker
-
Dimensions and weights
[L x W x H] 9,170 mm x 8,559 mm x 2,605 mm
Weight approx. 14,000 kg